本文主要分析了 Golang 中的一个第三方库,防缓存击穿利器 singleflight,包括基本使用和源码分析。
1. 缓存击穿
平时开发中为了提升性能,减轻DB压力,一般会给热点数据设置缓存,如 Redis,用户请求过来后先查询 Redis,有则直接返回,没有就会去查询数据库,然后再写入缓存。
大致流程如下图所示:
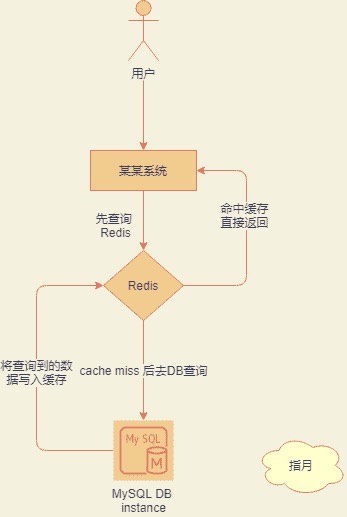
以上流程存在一个问题,cache miss 后查询DB和将数据再次写入缓存这两个步骤是需要一定时间的,这段时间内的后续请求也会出现 cache miss,然后走同样的逻辑。
这就是缓存击穿:某个热点数据缓存失效后,同一时间的大量请求直接被打到的了DB,会给DB造成极大压力,甚至直接打崩DB。
常见的解决方案是加锁,cache miss 后请求DB之前必须先获取分布式锁,取锁失败说明是有其他请求在查询DB了,当前请求只需要循环等待并查询Redis检测取锁成功的请求把数据回写到Redis没有,如果有的话当前请求就可以直接从缓存中取数据返回了。
2. singleflight
虽然加锁能解决问题,但是太重了,而且逻辑比较复杂,又是加锁又是等待的。
相比之下 singleflight 就是一个轻量级的解决方案。
Demo如下:
package main
import (
"errors"
"fmt"
"log"
"strconv"
"sync"
"time"
"golang.org/x/sync/singleflight"
)
var (
g singleflight.Group
ErrCacheMiss = errors.New("cache miss")
)
func main() {
var wg sync.WaitGroup
wg.Add(10)
// 模拟10个并发
for i := 0; i < 10; i++ {
go func() {
defer wg.Done()
data, err := load("key")
if err != nil {
log.Print(err)
return
}
log.Println(data)
}()
}
wg.Wait()
}
// 获取数据
func load(key string) (string, error) {
data, err := loadFromCache(key)
if err != nil && err == ErrCacheMiss {
// 利用 singleflight 来归并请求
v, err, _ := g.Do(key, func() (interface{}, error) {
data, err := loadFromDB(key)
if err != nil {
return nil, err
}
setCache(key, data)
return data, nil
})
if err != nil {
log.Println(err)
return "", err
}
data = v.(string)
}
return data, nil
}
// getDataFromCache 模拟从cache中获取值 cache miss
func loadFromCache(key string) (string, error) {
return "", ErrCacheMiss
}
// setCache 写入缓存
func setCache(key, data string) {}
// getDataFromDB 模拟从数据库中获取值
func loadFromDB(key string) (string, error) {
fmt.Println("query db")
unix := strconv.Itoa(int(time.Now().UnixNano()))
return unix, nil
}
结果如下:
query db
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
2021/07/17 11:04:13 1626491053454483100
可以看到 10 个请求都获取到了结果,并且只有一个请求去查询数据库,极大的减轻了DB压力。
3. 源码分析
这个库的实现很简单,除去注释大概就 100 来行代码,但是功能很强大,值得学习。
Group
type Group struct {
mu sync.Mutex // protects m
m map[string]*call // lazily initialized
}
Group 结构体由一个互斥锁和一个 map 组成,可以看到注释 map 是懒加载的,所以 Group 只要声明就可以使用,不用进行额外的初始化零值就可以直接使用。
type call struct {
wg sync.WaitGroup
// 函数返回值和err信息
val interface{}
err error
// 是否调用了 forget 方法
forgotten bool
// 记录这个 key 被分享了多少次
dups int
chans []chan<- Result
}
call 保存了当前调用对应的信息,map 的键就是我们调用 Do 方法传入的 key
Do
func (g *Group) Do(key string, fn func() (interface{}, error)) (v interface{}, err error, shared bool) {
g.mu.Lock()
if g.m == nil { // 懒加载
g.m = make(map[string]*call)
}
// 先判断 key 是否已经存在
if c, ok := g.m[key]; ok { // 存在则说明有其他请求在同步执行,本次请求只需要等待即可
c.dups++
g.mu.Unlock()
c.wg.Wait() // / 等待最先进来的那个请求执行完成,因为需要完成后才能获取到结果,这里用 wg 来阻塞,避免了手动写一个循环等待的逻辑
// 这里区分 panic 错误和 runtime 的错误,避免出现死锁,后面可以看到为什么这么做
if e, ok := c.err.(*panicError); ok {
panic(e)
} else if c.err == errGoexit {
runtime.Goexit()
}
// 最后直接从 call 对象中取出数据并返回
return c.val, c.err, true
}
// 如果 key 不存在则会走到这里 new 一个 call 并执行
c := new(call)
c.wg.Add(1)
g.m[key] = c // 注意 这里在 Unlock 之前就把 call 写到 m 中了,所以 这部分逻辑只有第一次请求会执行
g.mu.Unlock()
// 然后我们调用 doCall 去执行
g.doCall(c, key, fn)
return c.val, c.err, c.dups > 0
}
doCall
这个方法比较灵性,通过两个 defer 巧妙的区分了到底是发生了 panic 还是用户主动调用了 runtime.Goexit,具体信息见https://golang.org/cl/134395
func (g *Group) doCall(c *call, key string, fn func() (interface{}, error)) {
// 首先这两个 bool 用于标记是否正常返回或者触发了 recover
normalReturn := false
recovered := false
defer func() {
// 如果既没有正常执行完毕,又没有 recover 那就说明需要直接退出了
if !normalReturn && !recovered {
c.err = errGoexit
}
c.wg.Done() // 这里 done 之后前面的所有 wait 都会返回了
g.mu.Lock()
defer g.mu.Unlock()
// forgotten 默认值就是 false,所以默认就会调用 delete 移除掉 m 中的 key
if !c.forgotten { // 然后这里也很巧妙,前面先调用了 done,于是所有等待的请求都返回了,那么这个c也没有用了,所以直接 delete 把这个 key 删掉,让后续的请求能再次触发 doCall,而不是直接从 m 中获取结果返回。
delete(g.m, key)
}
if e, ok := c.err.(*panicError); ok {
// 如果返回的是 panic 错误,为了避免 channel 死锁,我们需要确保这个 panic 无法被恢复
if len(c.chans) > 0 {
go panic(e)
select {} // Keep this goroutine around so that it will appear in the crash dump.
} else {
panic(e)
}
} else if c.err == errGoexit {
// 如果是exitError就直接退出
} else {
// 这里就是正常逻辑了,往 channel 里写入数据
for _, ch := range c.chans {
ch <- Result{c.val, c.err, c.dups > 0}
}
}
}()
func() { // 使用匿名函数,保证下面的 defer 能在上一个defer之前执行
defer func() {
// 如果不是正常退出那肯定是 panic 了
if !normalReturn {
// 如果 panic 了我们就 recover 掉,然后 new 一个 panic 的错误后面在上层重新 panic
if r := recover(); r != nil {
c.err = newPanicError(r)
}
}
}()
c.val, c.err = fn()
// 如果我们传入的 fn 正常执行了 normalReturn 肯定会被修改为 true
// 所以 defer 里可以通过这个标记来判定是否 panic 了
normalReturn = true
}()
// 如果 normalReturn 为 false 就表示,我们的 fn panic 了
// 如果执行到了这一步,也说明我们的 fn 也被 recover 住了,不是直接 runtime exit
if !normalReturn {
recovered = true
}
}
逻辑还是比较复杂,我们分开来看,简化后代码如下:
func main() {
defer func() {
fmt.Println("defer 1")
}()
func() {
defer func() {
fmt.Println("defer 2")
}()
fmt.Println("fn")
}()
fmt.Println("根据 normalReturn 标记给 recover 赋值")
}
第一个点就是匿名函数:使用匿名函数,保证 defer 2 能在上一个 defer 1 之前执行。
因为 defer 1里面需要用到 normalReturn 标记,而这个标记又是在 defer2 中 处理的。同时为了捕获 fn 里的 panic 又必须使用 defer 来处理,所以用了一个匿名函数。
Go 中的 defer 是先进后出的,所以必须用 匿名函数保证 defer2 和 defer1 不在一个 函数里,这样 defer 2就可以先执行了。
正常执行顺序为: fn–>defer2–>根据 normalReturn 标记给 recover 赋值–>defer1
第二个就是用双重 defer 区分 panic 和 runtime.Goexit。
fn 正常执行后就会将 normalReturn 赋值为 true,然后 defer2 里根据 normalReturn 值判断 fn 是否 panic,如果 panic 了就进行 recover 捕获掉这个panic,然后把error替换为自定义的 panicError。
并且根据 normalReturn 的值来对 recovered 标记进行赋值。
最后第一个 defer 就可以根据 normalReturn + recovered 这两个标记和 err 是否为 panicError 来判断是 fn 里发生了 panic 还是说调用了 runtime.Goexit。
第三个点就是 map 的移除:
c.wg.Done()
g.mu.Lock()
defer g.mu.Unlock()
if !c.forgotten {
delete(g.m, key)
}
光看这里看不出具体细节,需要结合前面 Do 方法中的这段逻辑
if c, ok := g.m[key]; ok {
c.dups++
g.mu.Unlock()
c.wg.Wait()
return c.val, c.err, true
}
首先doCall 中调用了c.wg.Done(),然后 Do 中的阻塞在c.wg.Wait() 这里的大量请求就全部返回了,直接就 return 了。
然后 doCall 中再调用delete(g.m, key) 把 key 从 m 中移除掉。
通过这个done巧妙的让 Do 中的wait返回后直接把 key 移除掉,这样后续使用同样 key 的请求在执行c, ok := g.m[key]判断时就会重新调用 doCall 方法,再执行一次 fn 了。
如果不移除就会导致后续请求直接从 m 这里取到数据返回了,根本不会执行 fn 去db中查最新的数据,而且 m 中的数据也会越堆积越多。
DoChan
和 do 唯一的区别是 go g.doCall(c, key, fn),但对起了一个 goroutine 来执行,并通过 channel 来返回数据,这样外部可以自定义超时逻辑,防止因为 fn 的阻塞,导致大量请求都被阻塞。
func (g *Group) DoChan(key string, fn func() (interface{}, error)) <-chan Result {
ch := make(chan Result, 1)
g.mu.Lock()
if g.m == nil {
g.m = make(map[string]*call)
}
if c, ok := g.m[key]; ok {
c.dups++
c.chans = append(c.chans, ch)
g.mu.Unlock()
return ch
}
c := &call{chans: []chan<- Result{ch}}
c.wg.Add(1)
g.m[key] = c
g.mu.Unlock()
go g.doCall(c, key, fn)
return ch
}
Forget
手动移除某个 key,让后续请求能走 doCall 的逻辑,而不是直接阻塞。
func (g *Group) Forget(key string) {
g.mu.Lock()
if c, ok := g.m[key]; ok {
c.forgotten = true
}
delete(g.m, key)
g.mu.Unlock()
}
4. 注意事项
1. 阻塞
singleflight 内部使用 waitGroup 来让同一个 key 的除了第一个请求的后续所有请求都阻塞。直到第一个请求执行 fn 返回后,其他请求才会返回。
这意味着,如果 fn 执行需要很长时间,那么后面的所有请求都会被一直阻塞。
这时候我们可以使用 DoChan 结合 ctx + select 做超时控制
func loadChan(ctx context.Context,key string) (string, error) {
data, err := loadFromCache(key)
if err != nil && err == ErrCacheMiss {
// 使用 DoChan 结合 select 做超时控制
result := g.DoChan(key, func() (interface{}, error) {
data, err := loadFromDB(key)
if err != nil {
return nil, err
}
setCache(key, data)
return data, nil
})
select {
case r := <-result:
return r.Val.(string), r.Err
case <-ctx.Done():
return "", ctx.Err()
}
}
return data, nil
}
2. 请求失败
singleflight 的实现为,如果第一个请求失败了,那么后续所有等待的请求都会返回同一个 error。
实际上可以根据下游能支撑的 rps 定时 forget 一下 key,让更多的请求能有机会走到后续逻辑。
go func() {
time.Sleep(100 * time.Millisecond)
g.Forget(key)
}()
比如1秒内有100个请求过来,正常是第一个请求能执行queryDB,后续99个都会阻塞。
增加这个 Forget 之后,每 100ms 就能有一个请求执行 queryDB,相当于是多了几次尝试的机会,相对的也给DB造成了更大的压力,需要根据具体场景进去取舍。
